
一、前言
作者意识到,过去的隐私保护策略是以牺牲学习性能为前提的。作者认为产生这个问题的根本原因在于“模型效用”和“数据隐私”之间的关系没有被准确识别,导致隐私约束过于严格。在文中下,作者从最适化的角度来解决这个问题,并将问题描述为:“在给定一组隐私约束的情况下,使得准确性损失最小”。作者使用灵敏度来描述噪声对模型效用的扰动影响,并提出了一种新的优化噪声机制,该机制可以在符合差分隐私约束的前提下,提高整体学习的精确度。
二、介绍
2.1 论文结构
在作者的模型中,作者假设拥有对学习模型的白盒访问权,拥有任意辅助信息,并且隐私机制是公开的。
主要问题在于:当差分隐私的机制将噪声添加到模型参数中时,随着隐私要求变得严格,学习结果的效用会显著降低,即使使用矩统计已经显著改善了强组合的效用,问题仍旧没有彻底解决。
作者观察到,模型参数可以在一些精心优化的方向上扰动,从而使模型精度损失最小化。
因此,作者利用精度损失的近似值,把“设计最适性差分隐私深度学习机制”转化成“优化问题”,该问题搜索扰动噪声的概率密度函数,以最小化差分隐私约束下的加权模型失真。
2.2 前人工作
shokri等人的工作,组合方法仍旧需要大量的隐私预算。Abadi等人的方法,在MNIST上只有90%的精度。
现有的差分隐私机制大多是启发式的,因为隐私政策过于保守,往往需要添加过多的噪声,这对结果有害。
作者没有关注成本的凸性,而是关注算法的实际性能。
差分隐私最佳机制证明了当维度d=2和离散查询输出设置时,最佳噪声概率分布具有相关的多维阶梯形pdf(概率密度函数),但结论很难用于作者工作所针对的高维度场景。
三、背景
主要介绍了差分隐私和随机梯度下降SGD相关的知识。
在前两篇文章中已有相关介绍,在此不再赘述。
四、方案
在这一节,作者首先抛出了一个发现:参数上的扰动对隐私成本有不同的影响。基于这一点,作者近似了依赖于扰动噪声的效用,并将问题表述为“寻求扰动噪声的概率密度函数”问题,从而使得精度损失最小化。
4.1 模型敏感度
首先提出一个问题:对于一个训练模型,如果它的参数都被相同规模的噪声扰动了,那么扰动模型会有相同的精度吗?为了简单化起见,作者使用了成本函数来评估模型的效用:成本越小,效用越高。
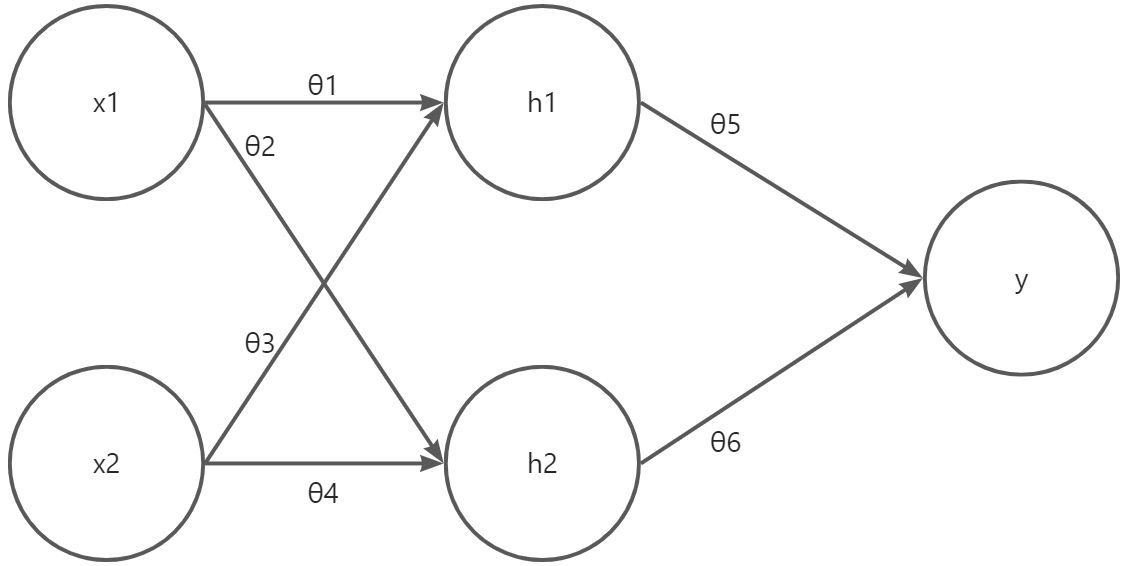
作者做了一个实验,首先创建了一个简单的感知机,输入层为{x1,x2},隐藏层为{h1,h2},权重为{θ1,…,θ6},输出为y。隐藏层使用了sigmoid函数,h1=φ(θ1x1+θ3x2+b1),y=θ5h1+θ6h2+b3。如图所示:
在对1000个样本进行150回计算后,获得了相关的参数,然后再向其中添加噪声。添加噪声也导致了成本函数关于参数的导数有了区别,由此产生了后面的一系列问题。
作者发现,θ1增加,cost反而减小,这与 的正负性保持一致。同理,b3增加时,cost也增加了。
作者由此得出了结论:成本函数的敏感性在参数空间中是异质的(对各个参数而言都有不同的敏感度变化趋势),导数可以作为敏感性的指标。为了使得成本最小,最好将较高的噪声添加到敏感度较低的参数里,反之亦然。
4.2 问题转化
作者向每个裁剪的梯度中增加精心校准后的噪声,添加的噪声是从一个多维的分布中采样的,能够根据他们自身的敏感度,使得整体的扰动成本最小化。
4.2.1 加噪的方向
令: 是所有训练样本成本的导数向量,总共有d个参数,D^{d}表示了可行域。
加噪的机制为: 从一个多维的概率分布P中获得,P将在随后介绍。
为了使得整体的成本最小化,z应该根据成本函数的最小敏感度方向来选取,而这样的方向是由w来决定的。我们假设目标函数为:
w表示关于每个参数的模型敏感度。上式的方程可以这样解释:我们将从特定概率分布中提取的随机噪声z投影到由权重w构建的空间上,目标是最小化总投影随机噪声的期望。
更确切的来说,就是更倾向于把噪声z_i加到那些导数为负的,或者导数尽可能小的方向上去。
4.2.2 P的情况
这一部分着重探讨了P应该满足的隐私情况。
已知,添加的噪声是从一个“由全局敏感度决定的概率分布”中提取的。为了与模型敏感度区分开来,我们使用g^{t}来表示第t次迭代时计算的梯度。
令 来表示在训练集 X 和 X’ 上计算出来的两个梯度向量。这两个数据集彼此之间只有一个样本的差距。全局敏感度可以表达为:
根据差分隐私的定义,机制K需要满足如下的条件:
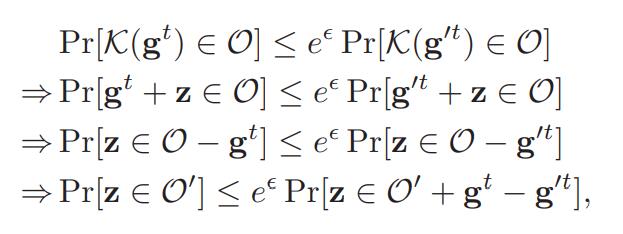
令,这样上式可以改写成:

这样,对于任意的O’和||Δ||<a,,差分隐私的约束条件就可以转化成P上的概率分布约束。
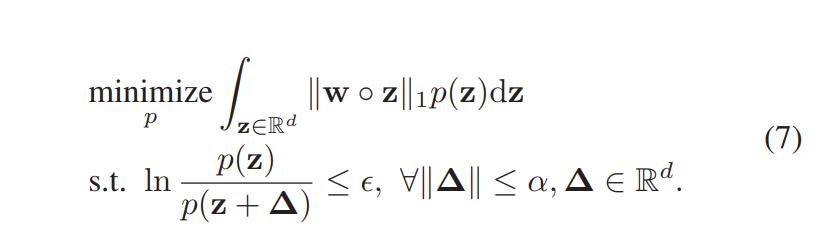
我们假设 z 遵循P的概率分布,其概率密度函数为 p(z)。为了满足上式,只需要找到概率密度函数p,当Δ有界时, 也就有界了。
综上所述,该部分的问题可以总结为以下程式:
4.3 主要结论
为了解决第(7)式,作者首先假设p是一个每个维度互相独立的多元高斯分布,因此我们能够列出它的概率密度函数:,其中,
是 的概率密度函数,随机噪声z_i也是从这里绘制的。问题可以化为:
对上式,把高斯分布的情况代入其中:
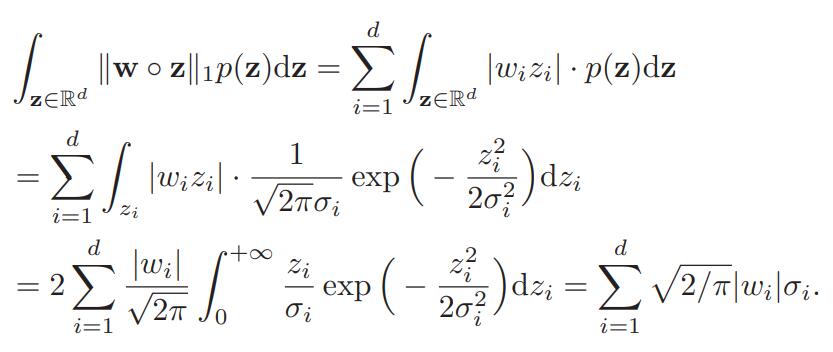
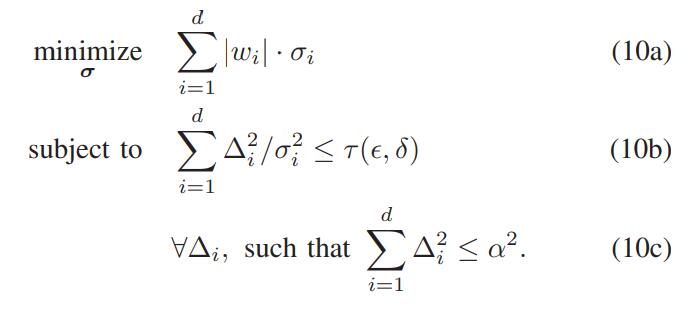
这样问题就变成了使得σ的权重和 σ=(σ1,…,σd) 最小。
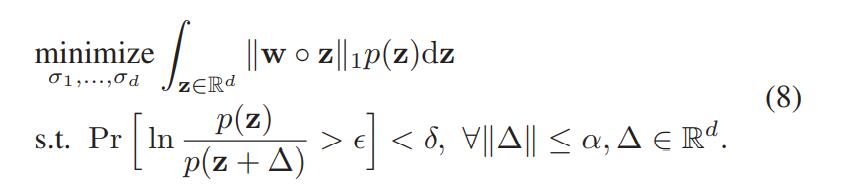
然后考虑约束条件。根据“矩统计理论”,一个关于隐私损失变量 的高阶矩被应用到了差分隐私约束中。这样的理由是,对c高阶矩的约束能够给出更大的约束变量的可行范围,这有助于找到式(8)的全局最优解。根据马尔可夫不等式: ,可以把约束条件变为:

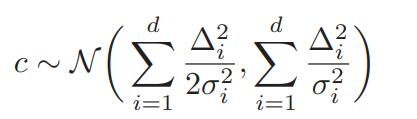
因为z符合高斯分布,因此可以把含有z的表达式c也写成高斯分布的形式:
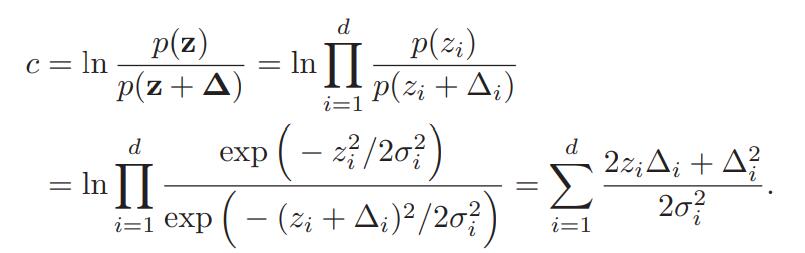
同时,,因此有:
把c的表达式代入到马尔可夫不等式中:

解上述不等式:
把目前为止的推理结果整合起来,令 ,那么复杂的式(8)就可以化简为:
考虑到等式 不仅符合式(10c),而且具备更广的应用,因此,式(10)最终可以化为:
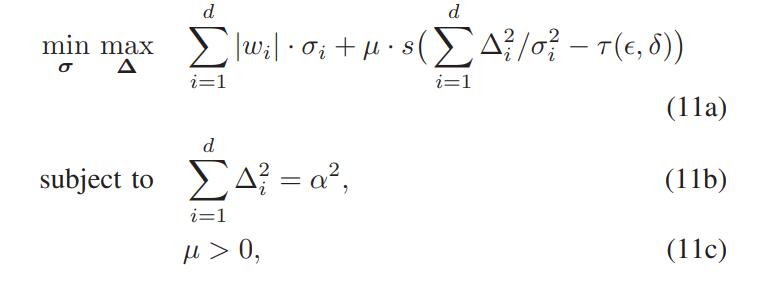
其中,s(x)是这样的一个函数:当x小于0时u,结果为0;否则为1。作者证明了当μ趋向于+∞时,式10等同于式11。
作者在不断增加μ的同时,更新σ和Δ的值,使用sigmod函数替代s(x),使用标准化技术处理非凸问题,每一步向着负梯度的方向逼近参数然后投影到可行域中。
对于每次更新的参数,作者给出了结论:对于k个迭代器实现(ε,δ)-差分隐私,第t次迭代应该满足(ε^t,δ^t)-差分隐私,即:

4.4 隐私机制
算法过程如图所示:
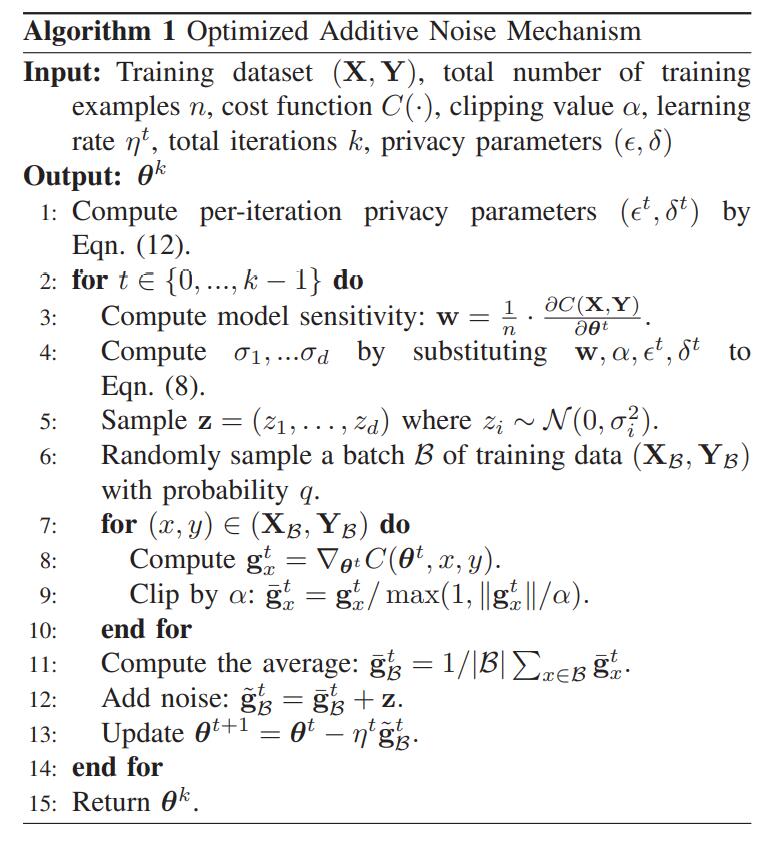
作者证明了该算法符合差分隐私。
五、评估
5.1 应用
作者使用了投影梯度下降法,在每次迭代中,该下降沿投影到约束集的梯度的相反方向移动,该方法大概需要50次迭代才能收敛。
在实验的过程中,最大的挑战在于高维度导致的计算时间过长。原因在于基于numpy的最优化和噪声生成并没有有效利用GPU加速。即使提高了高斯噪声生成器的速度,最适化噪声生成器的性能仍旧不理想,这是由于tensor operation在高维分布中随机生成向量是相当低效的。
因此,最终的噪声生成器分成两个部分:一个tensor计算噪声分布,一个Numpy噪声生成器。
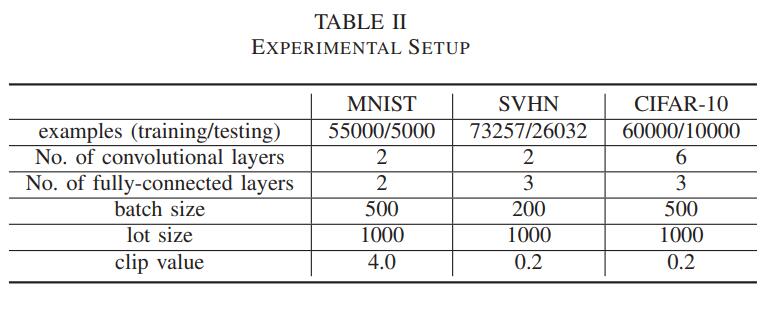
5.2 实验设置
5.3 和矩统计的比较
MNIST:优化后的噪声生成器在各个级别上的精确度都高于高斯生成器,在隐私级别更高时结果更加显著。
SVHN:不论是高隐私要求还是低隐私要求,作者的模型精确度都要比高斯模型的更高。
CIFAR-10:应对复杂数据集,模型的精确度有所下降,但仍旧比高斯模型的高。
5.4 模型结构的敏感度
作者表明,优化机制对模型结构和超参数的变化具有高度鲁棒性。
考虑以下可能影响结果的超参数:批量大小、隐藏层单元数和l2限幅值α。对于每组实验,重复使用之前的设置,但受控超参数除外。
直觉上,lot大小越小,模型就需要添加更多的噪声,精确度应该更低。但实际上,更多的噪声并不一定会导致精确度的降低。由于最优化噪声机制谨慎地校准了噪声以使得成本最小化,模型精度受lot规模的影响很小。
但是,由于本文的思路是围绕着成本函数展开的,主要考察的是沿着梯度下降的方向添加噪声,因此裁剪值的大小会严重影响精确度。当裁剪值很小时,参数的变化受到裁剪的约束,精确度会被影响。
但是高斯机制并没有这样的表现,因为当裁剪值较大时,添加的噪声太大了。
六、结论
在本文中,作者寻求一种优化的差分隐私机制,用于在众包用户数据上执行隐私保护学习。该问题被描述为一个优化,该优化最小化了一组差分隐私约束下的精度损失。问题的高维性是一个主要障碍,因此作者从理论和工程角度解决它。对MNIST、SVHN和CIFAR-10的评估表明,作者提出的隐私机制提高了所有隐私级别的模型准确性,特别是在高隐私制度下,但只增加了可忽略的运行时开销。