
一、任务说明
由于最近工程实验较多,算法、质量测试、软件工程…因此这两周研读的进度较小。主要的精力集中于GAN的学习上。在此做简要整理。
GAN知识框架
论文研读
本科阶段没有接触过很多的机器学习相关的项目,所以难免会有纰漏。主要分享我这几个月来研读相关的一些经验,和自己的推导。
二、知识总结
2.1 GAN—生成对抗网络
2.1.1 引言
如果最近有关注一些美术、绘画等艺术相关的话题的话,那么“AI作画”肯定是一个绕不顾去的坎。很多热门的AI作画网站,例如:Midjourney、mimic、NovelAI…在最近一到两个月的时间里,频繁占据了各大论坛的热门。画师们从未像现在这样对于新技术有着如此强烈的恐惧感,他们担忧于自己随时可能会被AI取代,但这一切只是技术野蛮生长的时代的开始。在绘画之外,新闻、媒体、娱乐、报道…“AI生成图片”的技术,也在潜移默化地影响着这些行业。8月份四川山火,占据各大头条的这张“逆行者”照片,其实就是AI生成的,而在原作者出来辟谣之前,几乎没有人能够发现。
AI绘画的飞速发展让人们不得不仔细审视其原理、影响和未来的空间。本次分享我就简单介绍一下AI绘画用到的算法(GAN和diffusion)及其发展历程。本次我们的主题是GAN,所以我会详细介绍GAN相关的原理、算法、以及拓展。对于diffusion的部分,我则做一些简单的介绍和应用。
2.1.2 提纲
生成对抗网络-GAN
算法原理
简单讲解-DCGAN
优化拓展-WGAN
扩散算法-diffusion
原理
优缺点、两者之间的比较
GAN总结
2.1.3 GAN-原理
GAN,全称是:Generative Adversarial Network,即:生成对抗网络。由 lan Goodfellow 于2014年提出。它的原理非常简单,设置两个网络G: Generator 和D: Discriminator,它们分别进行如下工作:
G:Generator, 生成网络,接收一个随机的噪声z,通过这个噪声来生成图片。我们把它的输出记为 G(z)
D:Discirminator, 判别网络,接收一张图片 x,判断它是不是“真实”的。它的输出记为D(x),D(x)∈[0,1],表示“x是真实”的概率。D(x)=1,表示 x 100%为真实的图片。D(x)=0,表示它不可能是真实的图片。
在训练过程中,生成网络 G 的目标是尽量生成真实的图片去“欺骗”D,而判别网络 D 的目标就是尽量把 G 生成的图片和真实的图片区分开来。这样一来,整体上就构成了一个动态博弈的过程。由于训练过程没有预先标准,因此 GAN 也是“无监督学习”的一种。
在理想情况下,G生成的图片足以以假乱真,而 D 难以判定 G 生成的图片是否真实。也就是说:

更具体一点,我们可以用如下的数学公式来表示GAN的目标函数:
我们可以这样来理解这道公式:
D(x) 表示判别器对真实图片输出的概率值,D(G(z))表示判别器对生成图片输出的概率值
对于G而言,它希望生成的图片越能以假乱真,因此 G 应该希望 D(G(z))越来越大,最好趋向于1,反应到V(G,D)上,就是V越来越小。因此式子前面写了:
对于D而言,它希望自己能够精准识别真实图片和生成图片,因此D应该希望D(x)趋向于1,D(G(z))趋向于0,反应到V上,就是V越来越大。因此式子前面写了:
在 Goodfellow 的原论文中,作者给出了GAN算法的如下表现形式:
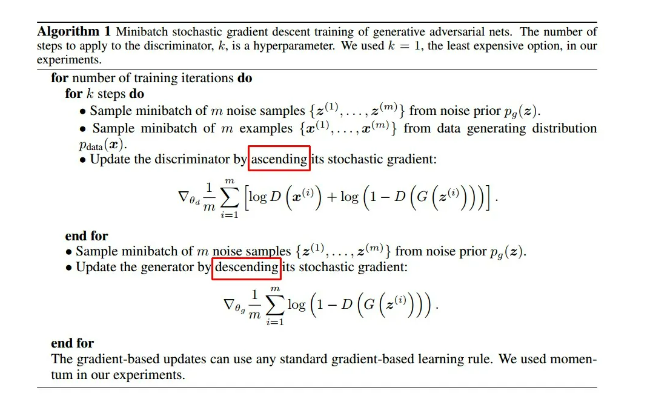
其分析如下:
两个for循环,外层代表迭代,内层代表训练
每次迭代,首先训练判别器D,然后训练生成器G
训练过程采用了随机梯度下降算法:
对于D:对m张生成图片以及m张真实图片,用D进行判别,取均值然后求其梯度。由于D的期望是使得V尽可能大,因此训练时加上梯度。
对于G:对于m张生成图片,用D进行判别,这里只取 log(1-D(G(z)))的部分(因为 x 是真实图片,与G无关)。取均值然后求其梯度。由于G的期望是使得V尽可能小,因此训练的时候需要减去梯度。
以上就是GAN算法的设计思想。接下来我们用两个实例 DCGAN 和 DPGAN,来给大家讲解一下GAN的实现和应用。
2.1.4 DCGAN
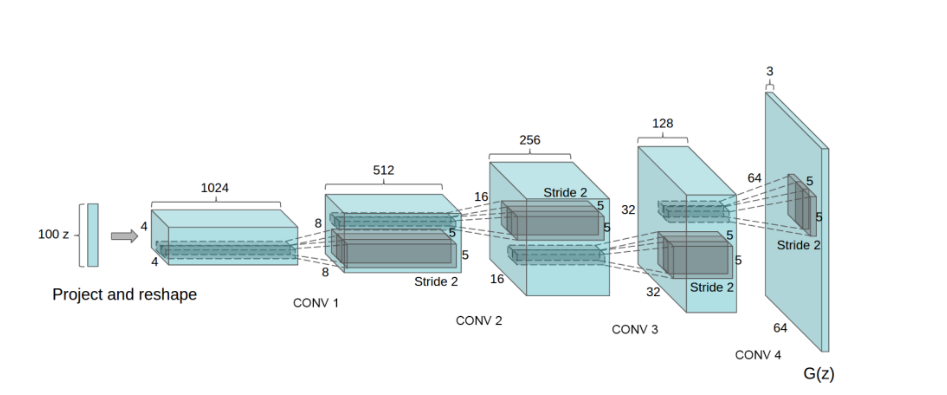
我们在这里用DCGAN来完成对于GAN的一个初步了解。它的过程和上面介绍的完全一致,区别在于把上述的两个G和D换成了卷积神经网络,然后卷积神经网络的结构做了一些改变,来提高样本的质量和收敛速度。采用CNN的原因是,CNN是深度学习中对于图像处理应用最好的模型之一。卷积神经网络通过特定的filter,可以识别出图片的某些特征,进而实现图像识别的功能。
在DCGAN中,生成器的结构是这样的,一共是四层:
我们的训练目标比较有趣:我们打算借用DCGAN来生成一系列的动漫风格头像。这个工作首先由日本的一位开发者在2015年圣诞节完成,思路发表在了Qiita上。由于时间的缘故,像现在比较流行的框架tensorflow和pytorch,一个是2015年11月,一个是2017年的,因此这个版本的“头像生成”并没有使用这些现在流行的框架,而是使用了一个比较小众的框架chainer进行训练。
我们根据其思路,采用tensorflow重写这个程序。代码的重点部分如下所示:
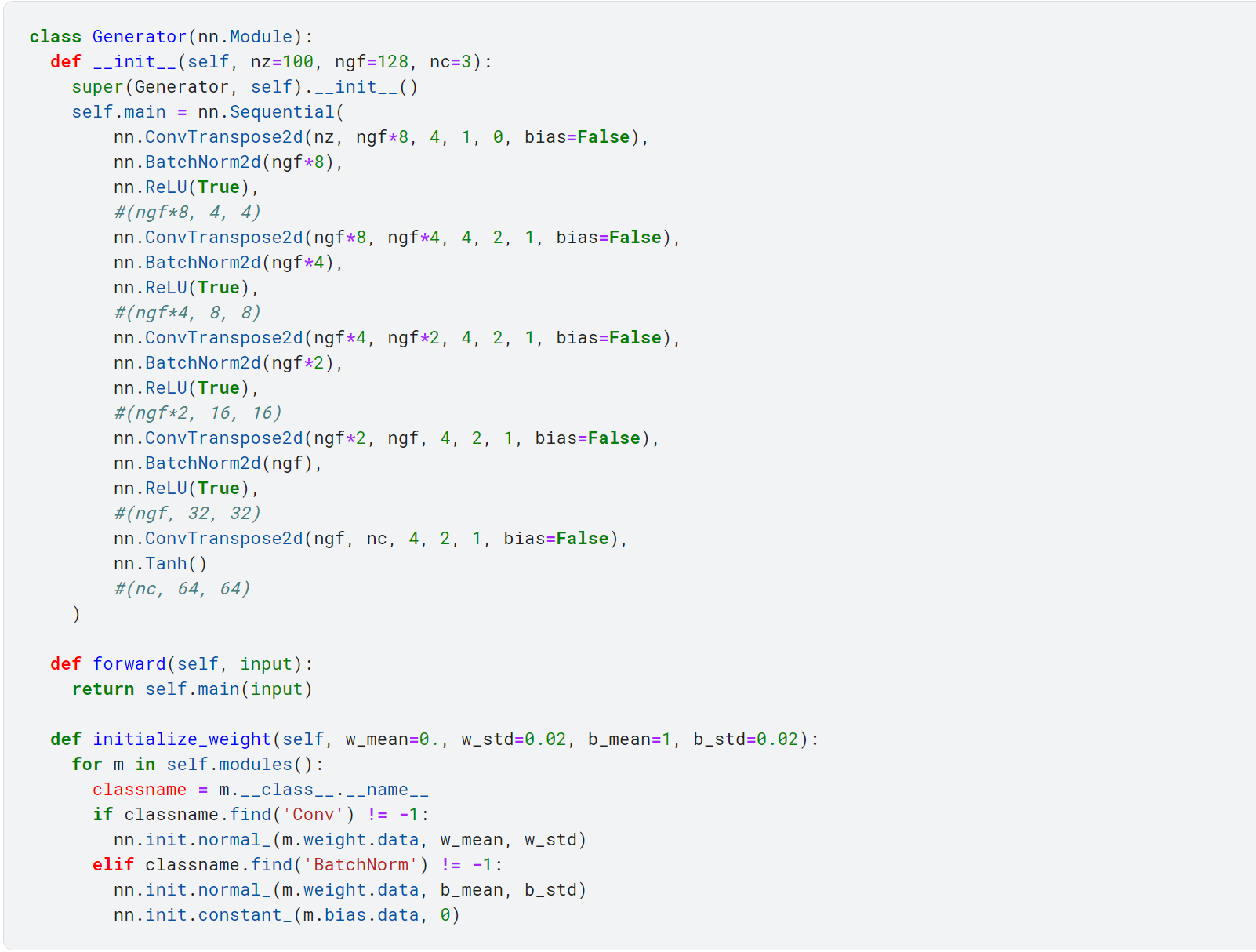
- 首先是生成器和鉴别器,如下所示,完全遵循上述cnn的格式进行模板化的创建:
- 生成器
- 判别器
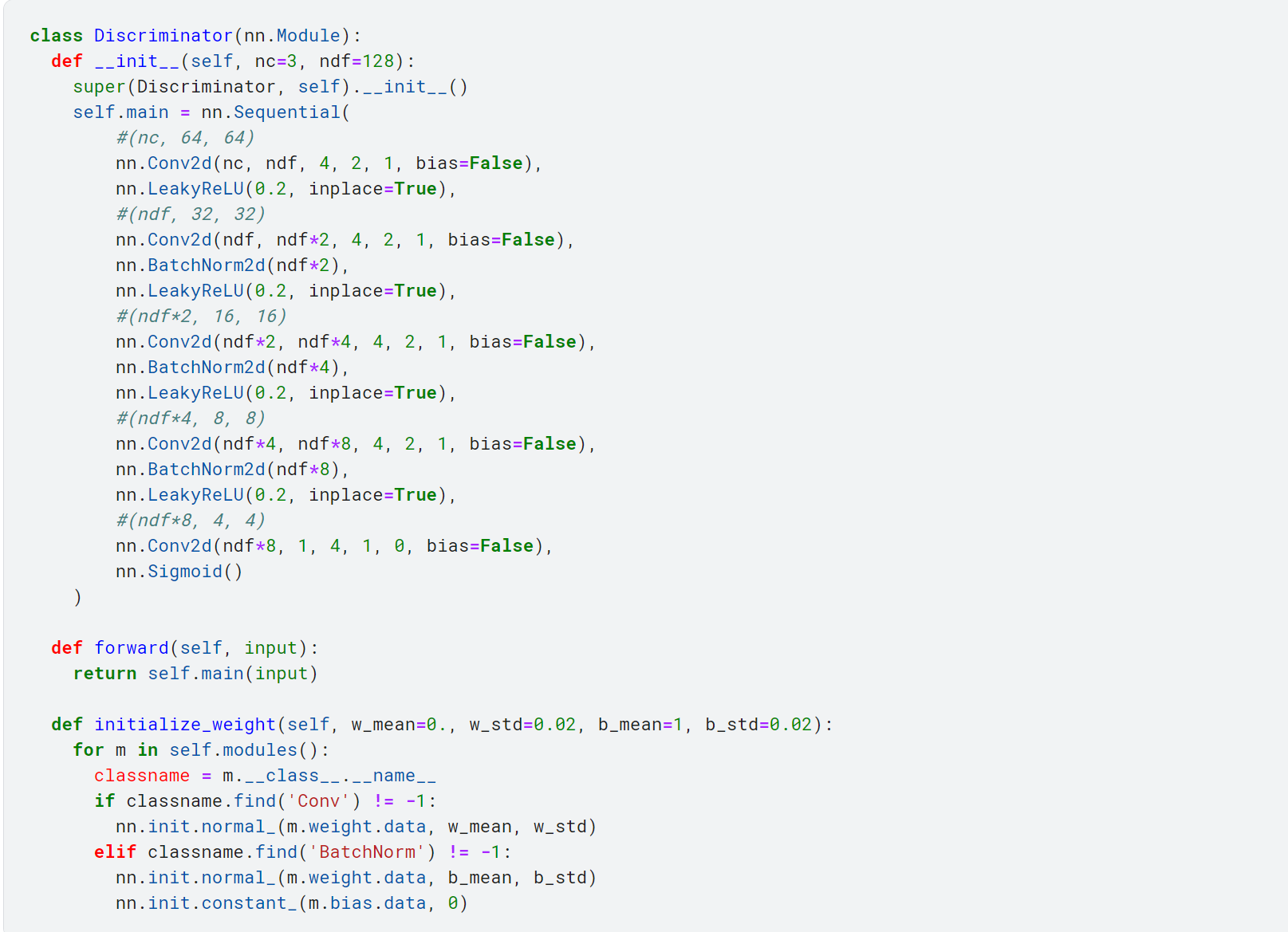
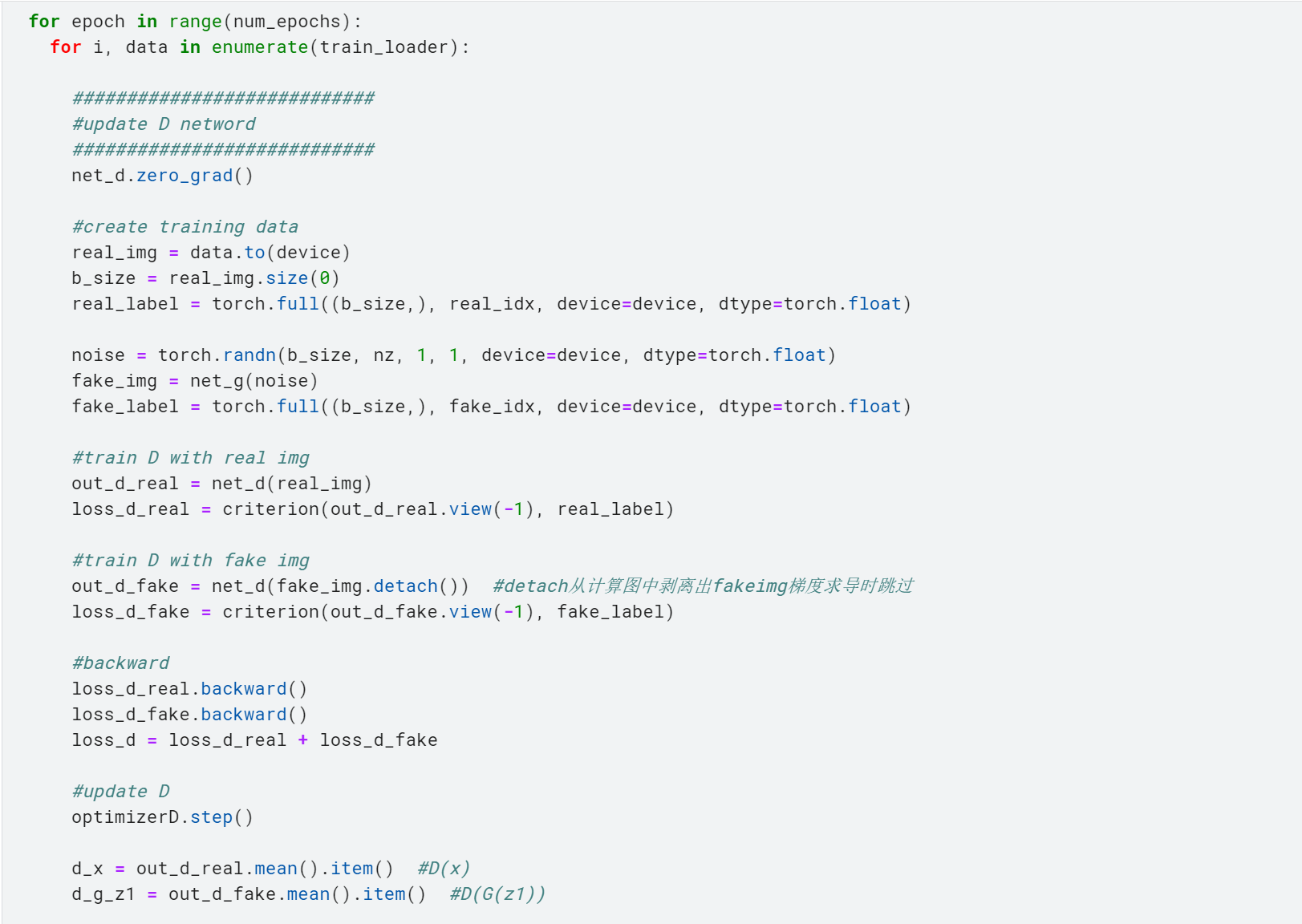
- 训练部分如下所示,我们首先进行的是鉴别器的训练:
- 1. 在初始化梯度之后,首先使用生成器网络net_g(),传入一个噪声,生成fake_img。
- 2. 然后使用鉴别器网络net_d(),分别使用真实图片和生成图片让鉴别器去识别。
- 3. 分别记录下这两者的损失函数。
- 4. 两者分别通过backward()函数求导,再相加,这就是鉴别器的损失函数了。
- 5. 通过step()函数来更新参数。
- 然后是对生成器的训练:
- 1. 在初始化梯度之后,我们使用鉴别器网络net_d()对之前的fake_img进行鉴别
- 2. 计算生成器的损失函数
- 3. 通过step()函数来更新参数
- 4. 训练结果可视化(每50次迭代输出一次中间结果)
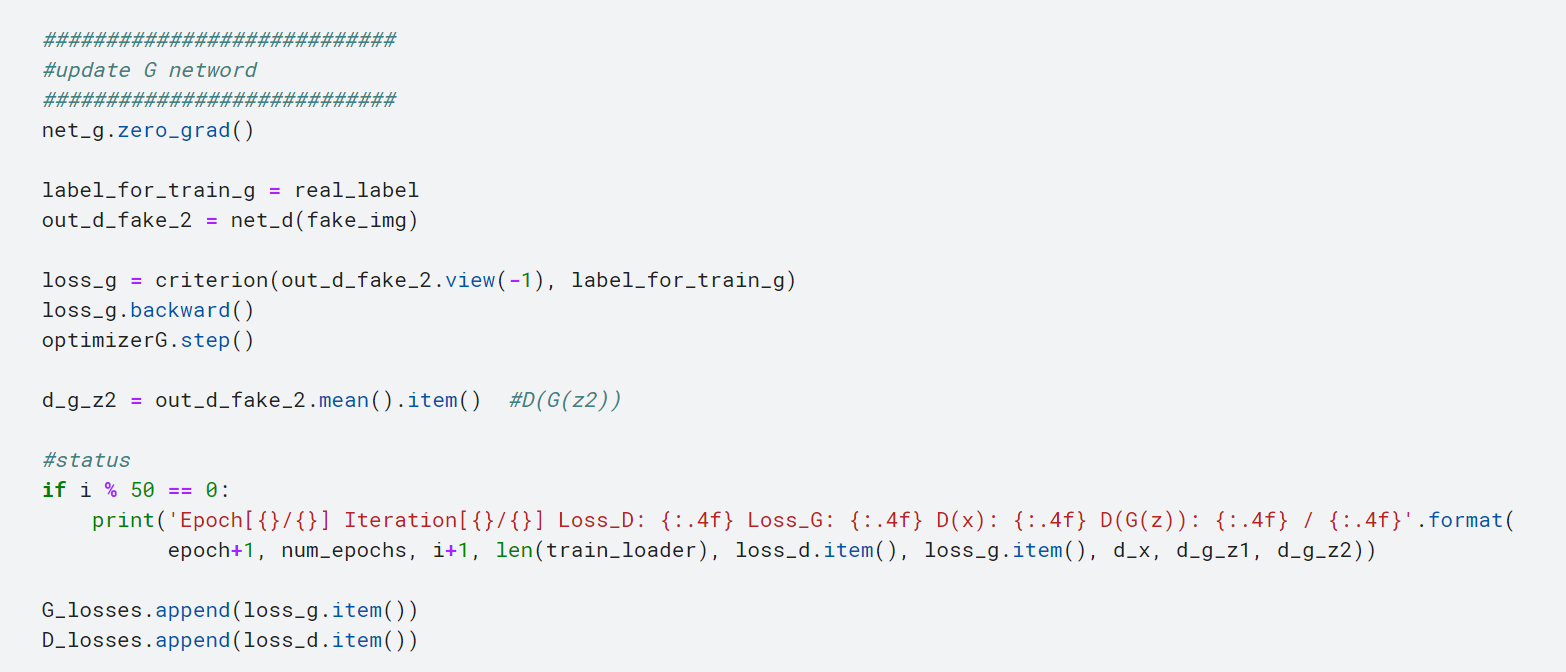
- 需要注意的是,我们计算生成器的损失函数时,不难发现,我们对fake_img计算损失函数时,使用的是real_label,这是一种训练技巧,经验表明对于生成器训练时这样操作,效果会更好一点。
我们在kaggle平台上进行DCGAN的训练。GPU为Tesla P100,cuda加速,100轮epochs,每轮迭代200次,每一次迭代的 batch_size 为128,一共运行了6.7h。其中,生成器的学习率为0.002,鉴别器的学习率为0.0002。我们制作了一个gif来演示GAN的训练过程:
可以看到,随着训练过程的推进,生成效果逐渐从“噪声”->“模糊的色块”->“大致的人影”->“难辨真假”。
我们使用了Adam优化,相比起最初版未优化的DCGAN版本,在生成图像的结构、色块…问题上要好了不少:
- DCGAN生成的图像:

- 未优化的DCGAN:

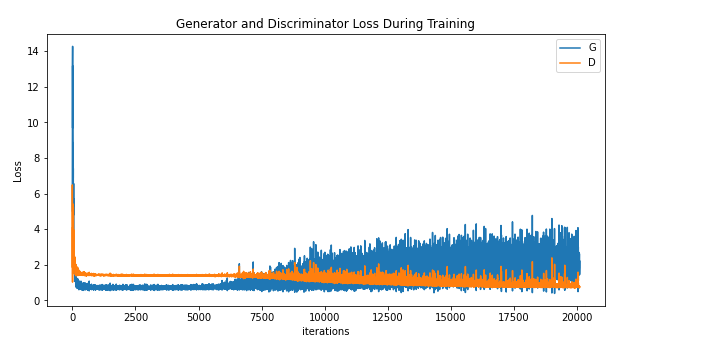
G和D的损失函数随迭代次数的增加而变化,其图像如下所示。随着迭代次数的增加,对抗逐渐激烈起来,起伏很大。
在编码、训练、调参的过程中,我们也发现了不少问题。这些问题也是GAN的特征,以及它初始算法存在的一些问题:
【问题】:
1、为什么要先训练D,再训练G?
【答】由于刚开始的时候生成器没有反馈,给它一堆随机向量噪声,他生成图片的质量一开始必然是低下的,那么鉴别器很容易就能识别并且判假。
如果先训练生成器,再训练鉴别器,生成器G依靠上一轮的鉴别器D结果来更新,而鉴别器D直接对着这一轮的生成器G结果进行判别,整体上就会呈现鉴别器的优势。如果鉴别器的训练太强了,就会产生梯度消失的问题。这种训练对鉴别器是有益的。
交换一下训练顺序,先训练鉴别器,鉴别器D依靠上一轮生成器G的结果进行判别,生成器G根据这一轮的鉴别器D结果来更新,整体上会更有利于生成器的训练。
而在训练GAN的时候,我们往往会要求鉴别器D的训练不要太强。因为GAN的本质目的还是“生成”,“判别”只是有一个辅助的作用。判别器D的训练太好了,后期容易造成生成器的梯度消失。
2、为什么训练生成器时,我们明明是对D(G(z))求梯度,但label仍旧是“real_label”?
【答】这是一种训练技巧。
首先我们从“最终结果”入手来考虑其合理性。理想情况下,鉴别器D应该判别不出生成器G结果的真假,也就是这个时候,real_label还是fake_label,在鉴别器眼中是无意义的、等价的。因此,从最终结果入手,把fake_label设置成real_label并不影响理想情况的合理性。
这样训练的一个好处是,对于一个fake_img,如果一开始效果很差,那么鉴别器很容易就判定为假,此时标注却为真,整体误差会很大。大误差通过backward()求导反向传播,会造成生成器网络的大更新。
反过来,如果这是一个fake_img,但生成器的效果很好,那么鉴别器就容易判定为真,此时标注也为真,那么误差就会很小,小误差反向传播,只会对生成器网络的参数进行微调。
这样就使得生成器网络的更新符合生成效果的迭代了。
3、如何理解损失函数?
【答】这需要和损失函数的计算方式联系起来。
我们首先需要明白一点:判别器是如何确定一张图是真是假的?——当然是比较这张图和真图的“相似性”。这么说可能比较模糊,我们用更严格的表示:
对于一张图,我们可以把它映射到一个三维矩阵上:使用“像素点的位置+RGB通道”来描述。这样,就可以把图片转化成一个分布。
鉴别器比较图片和“真图”的相似性,就是比较这两张图分布的相似性。
图像的相似性问题——>分布的相似性问题——>比较信息熵。
衡量分布的相似性问题,我们可以使用“相对熵”的概念。给定两个分布p(x)和q(x),p(x)相对q(x)的相对熵被定义为:

从公式上理解,相对熵其实就是交叉熵和香农熵的差。这道公式在后面的WGAN里会用到,这里就暂时做一个简单的介绍。
很显然,如果p(x)和q(x)越接近,那么相对熵就会趋向于0。因此,如果使用相对熵来衡量分布的差距,那么训练的目标应该是使得相对熵不断地逼近0。
我们可以通过吉布斯不等式来证明,相对熵具有非负性。同时由其公式本身可以看出,相对熵具备非对称性。这使得相对熵在计算一些非对称的分布差距时具有良好的表现,比如“差分隐私”。但是,在GAN中,这种特性就很致命了。比如,A和B的距离为t,那么B和A的距离自然也应该为t。但是,由于相对熵的非对称性,这就使得:

因此,我们需要对相对熵进行一些简单的改变,使得其具备对称性。一个很朴素的想法:

这样就使得分布具备了对称性。这就是JS散度,也是GAN初步时普遍采用的损失函数计算方式。
不同的损失函数直接影响了参数更新的方式,从而影响了GAN的性能,因此对于损失函数的选择也是有效训练GAN的难点。
以上便是GAN算法最基本的框架和梗概。下面主要介绍一下GAN的主流拓展——WGAN。它主要用于解决JS散度的梯度消失问题。
2.1.5 优化拓展——WGAN
仔细观察JS散度,我们把m的表达式代入其中:

由于GAN的训练,本质是通过更新参数,来把G生成图像的分布不断逼近真实的图像分布,在这个过程中,会存在一个很尴尬的问题,如下所示:
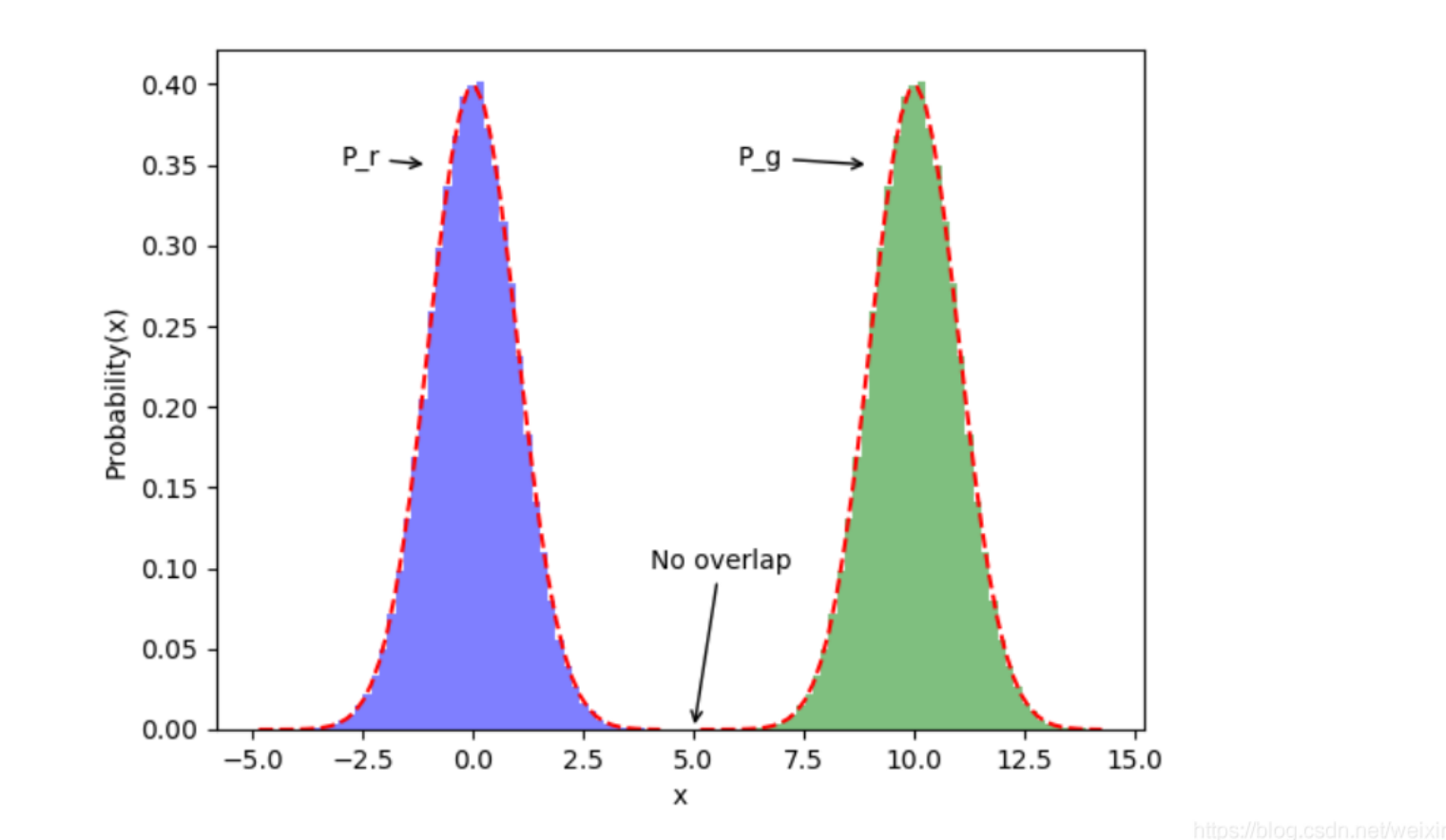
两个完全不重叠的正态分布在不断靠近的过程中,肯定是从p(x)(或q(x))趋向于0的部分开始逐渐重叠、靠拢的。但当我们把p(x)=0或者q(x)=0代入JS散度的公式时,我们会发现,JS值会恒等于 ln2。证明如下:
- 假设存在完全不重叠的点x0,当x>x0时,有p(x)趋向于0,当x<=x0时,有q(x)趋向于0。则对于x>x0时:
- 同理,当x<=x0时,q(x)趋向于0,同上论述。
我们这就发现了JS散度的致命缺陷:如果一开始两个分布完全没有重叠,那么不管两个分布的中心有多近,JS散度值恒定为ln2,无法通过梯度下降算法来求解。梯度消失了。
为了解决这个问题,2017年的时候,Martin Arjovsky等人发表了著名的《Wasserstein GAN》论文,提出了一种全新的度量方式Wasserstein距离,它是这么定义的:

其中,表示 Pr 和 Pg 组合起来的所有可能的联合分布的集合。对于其中每一个可能的联合分布γ,我们可以从中采样出一个 (x,y),其中 x 为真实样本,y 为生成样本,然后计算这两个样本的距离 || x - y ||。接着对这个距离求期望 E。 这样,每一个可能的联合分布就对应一个可能的距离期望。在所有期望中选取下界 inf,我们把这个下界定义为 Wasserstrin 距离。
我们可以这样形象地去理解这个 Wasserstein 距离:把两个分布想象成两个沙土堆,现在我们需要计算两个沙土堆之间的差距,而Wasserstein 距离就相当于一个推土机,它不断地从把Pr这堆沙土挪到Pg位置(求||x-y||),并且计算中间的消耗(求期望)。而W(Pr, Pg)就是所有消耗中最小的(求下界inf)。因此,Wasserstein距离又被称为“推土机距离”。
Wasserstein距离相比KL散度、JS散度的优势在于,首先它具备对称性(||x-y||),其次它在两个分布完全不重叠的时候,并不会产生JS散度那样梯度消失从而无法指引学习的困境。
在原论文中,作者采用 Wasserstein 距离作为判别的标准,并且改进了GAN的训练过程,提出了WGAN算法:
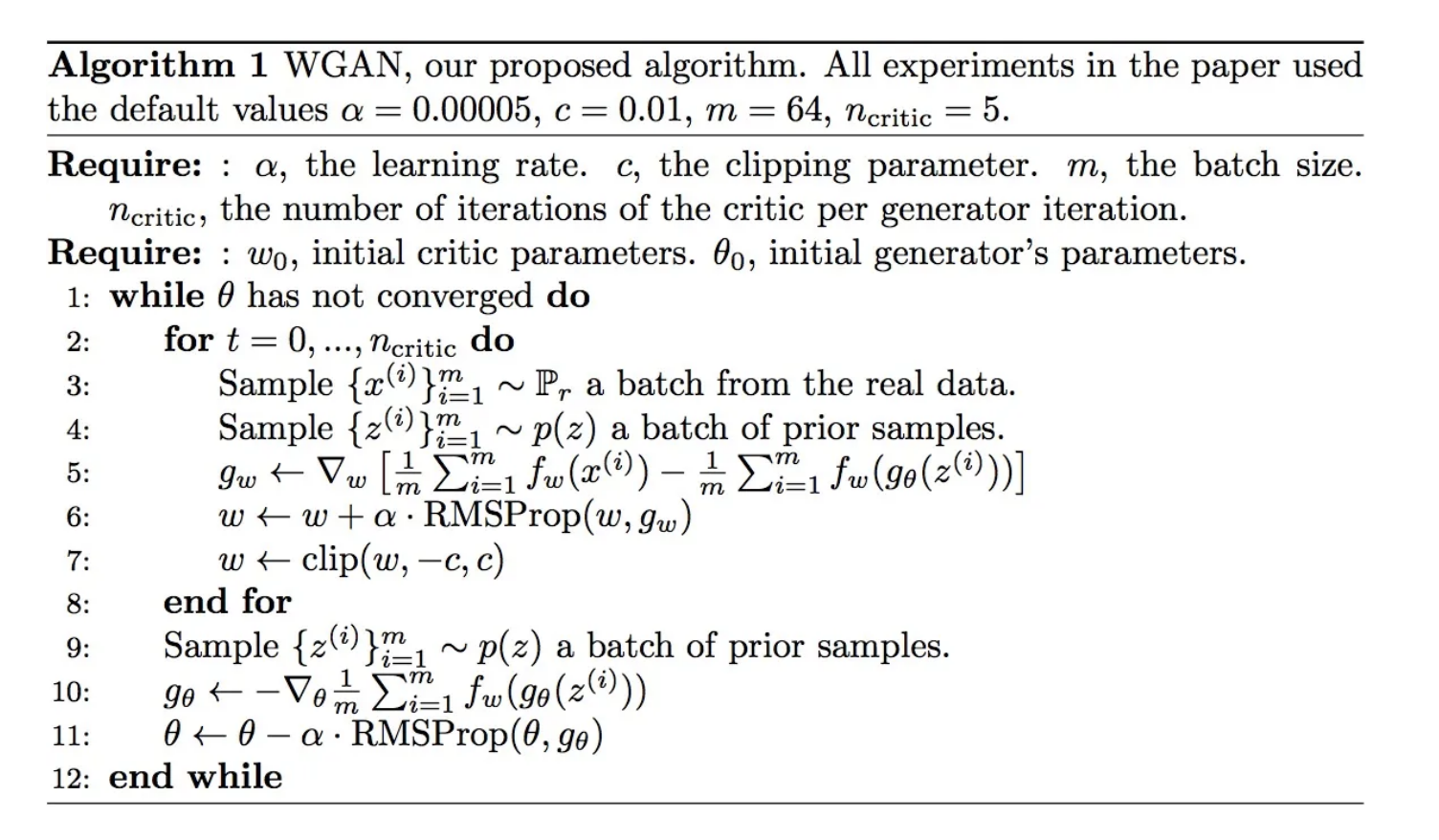
相比起 lan Goodfellow 的初始版本,WGAN一共做出了以下四点改变:
去掉判别器最后一层的sigmoid
判别器的f采用wasserstein距离,损失函数loss不取log
每次更新判别器的参数之后,把它们的绝对值截断到不超过一个固定常数c
不要用基于动量的优化算法(包括momentum和Adam),而是推荐使用诸如RMSProp等的优化函数。
比较有意思的一点是,上述的第三点采用了一个clip函数,它的作用是把判别器的更新幅度上限限制到C,从而避免了判别器的更新幅度过大、性能太强,导致生成器的“积极性”遭受过大打击。这种采用 clip 的思想算是一个比较常用的技巧,在2016年差分隐私领域的经典论文《Deep Learning with Differential Privacy(CCS)》中就采用了这种方式来进行SGD训练。而lan Goodfellow对那篇论文也有不少的贡献。
2.1.6 Diffusion算法
最后,我们再简要介绍一下图像生成领域的新星——Diffusion算法。在之前,利用GAN生成图像虽然引起了相关领域工作者的一些兴趣,但大部分画师还是将其视作“玩具”,AI绘画虽已造成了冲击,但还不是这么强烈,主要受影响的是那些只会画“大头画”的入门级画师。直到2020年扩散算法的提出,以及2022年stable-diffusion的开源,这种冲击终于变成了绘画大厦上的乌云,犹如20世纪初彻底摧毁了物理学大厦上的乌云一样。
Diffusion 正式提出是在2020年的一篇名为《Denoising Diffusion Probabilistic Models》(简写为DDPM)的论文,在该论文中,作者论述了Diffusion算法的基本思想,它主要包括两个方面:
前向过程:往一张图片里面不断添加噪声,直至整张图片都变白为止。
逆向过程:基于马尔可夫链,逆向学习上述的加噪过程,也即学习:“一张满是噪声的图是如何变成一张图像的”
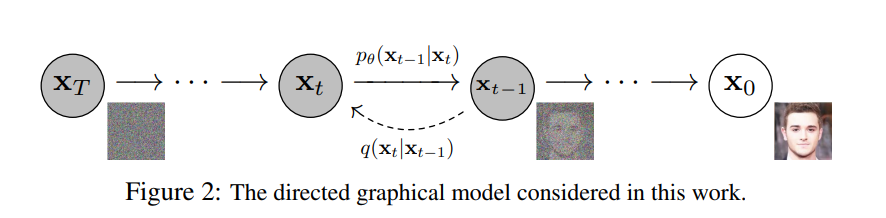
不同于GAN,Diffusion基于噪声生成的图像和原图像是“同维度”的。
相比起GAN,Diffusion算法的优点是什么呢?最大的优点是生成的图片质量要高的多!而且支持高像素图片的稳定生成。这一点是GAN无法企及的。此外Diffusion算法只需要训练“生成器”,不需要训练别的网络*(判别器等)*,这也导致在训练的难度上扩散算法要容易许多,不需要像GAN一样去做诸多的调参等等。这或许也验证了一句话:“几行简单正确的数学推导,可以比近十年的大规模调试超参调试网络结构有效得多。”
Diffusion算法的问题也相当明显,最大的缺点就是训练开销特别大。扩散模型依赖于扩散步骤的长马尔可夫链来生成样本,因此在时间和计算方面会非常昂贵,尤其是对显存的要求非常高。
我自己搭建的Stable-Diffusion模型,光是使用开源的、已经训练好的模型进行图片生成,都需要12G以上显存的显卡,而且图片的像素必须限制在1024*1024以下,不然就会爆显存。显存更小的显卡,可以生成的图片像素自然会更小,至于训练的开销就更不用说了。在这一点上,GAN具备了无可比拟的优势。也正因成本上的优势,GAN的灵活性目前要高得多。
2.1.7 GAN总结
一、特点
无监督学习的方式,采用博弈论的思想,用对抗的方式生成图片
GAN的思想很简单,因此部署起来非常方便,可以根据具体问题来灵活地构建
GAN可以用于样本生成、AI换脸等等一系列和“生成样本”或者“图像”相关的任务
二、不足
GAN的训练非常困难,如果判别器太强了,生成器的效果就会大打折扣,甚至梯度消失;如果判别器太弱了,生成器的梯度不准,图像会非常奇怪。只有判别器和生成器旗鼓相当,或者说不好不坏的时候,GAN的效果才会比较好。
GAN比较适合一些比较小的图像生成,比如人脸、小的样本…对于比较大的图,训练难度会几何倍增长(分布计算难度增大)
GAN的loss函数难以指引训练步骤,而对于判别器的判别操作,也有诸多的不足和优化的余地 (KL散度、JS散度、WGAN…)